| 洋上風力研究所 |
0858-35-2283
|
|---|
合同会社 洋上風力研究所
|
「移動船舶によるオフショア風況観測法に関する研究」抜粋
第2章 浮体上に搭載する基礎的な洋上風況観測
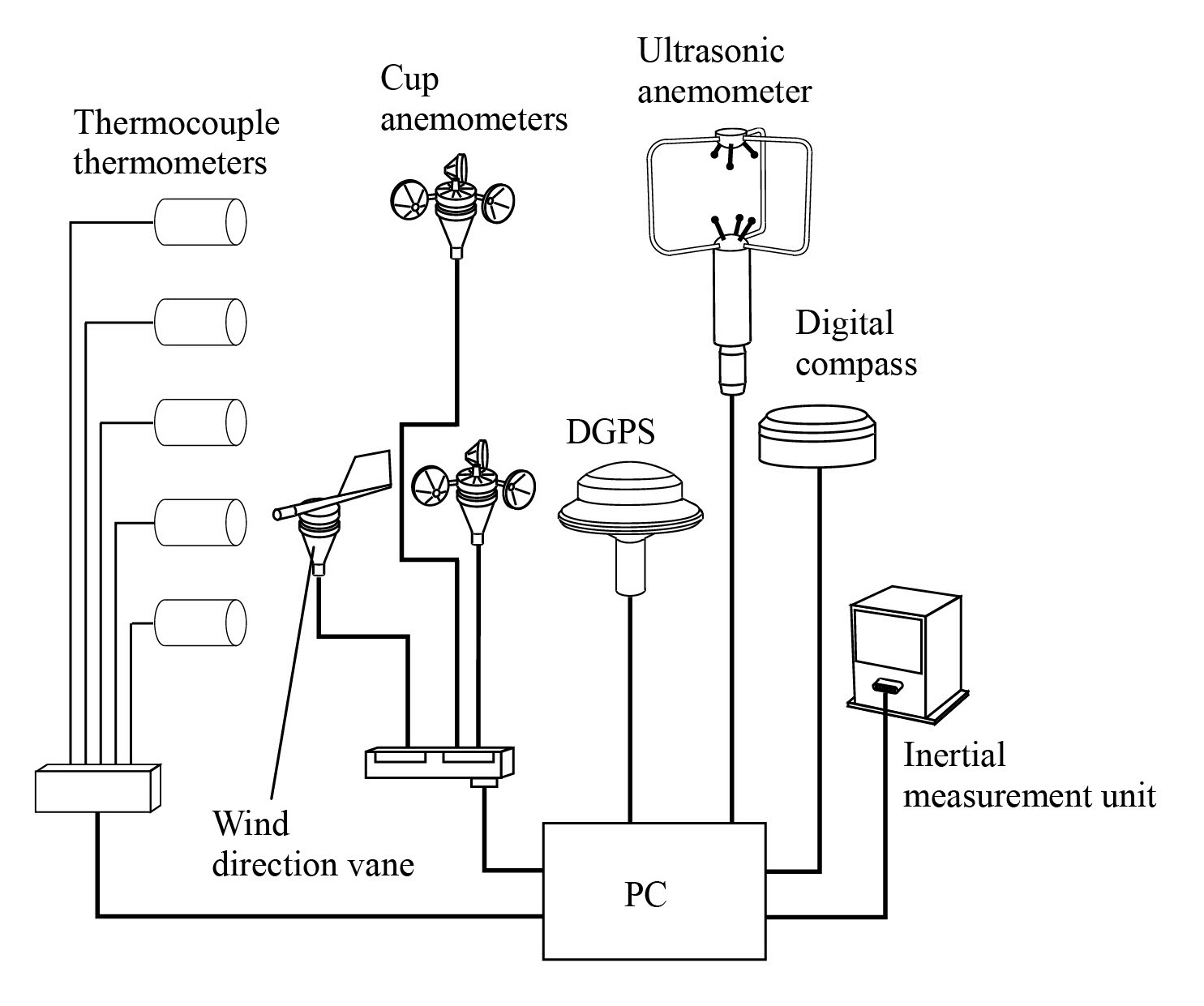
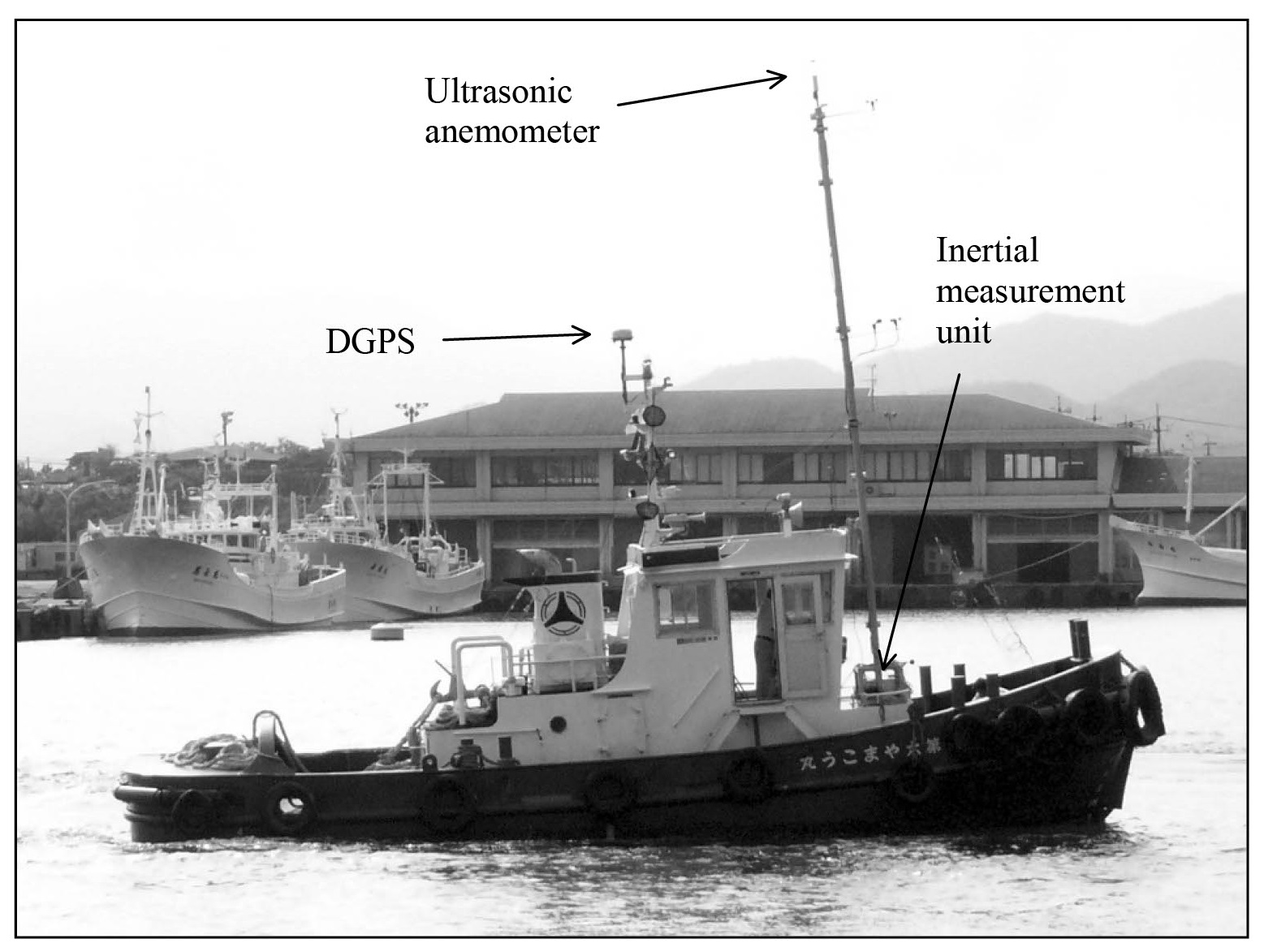
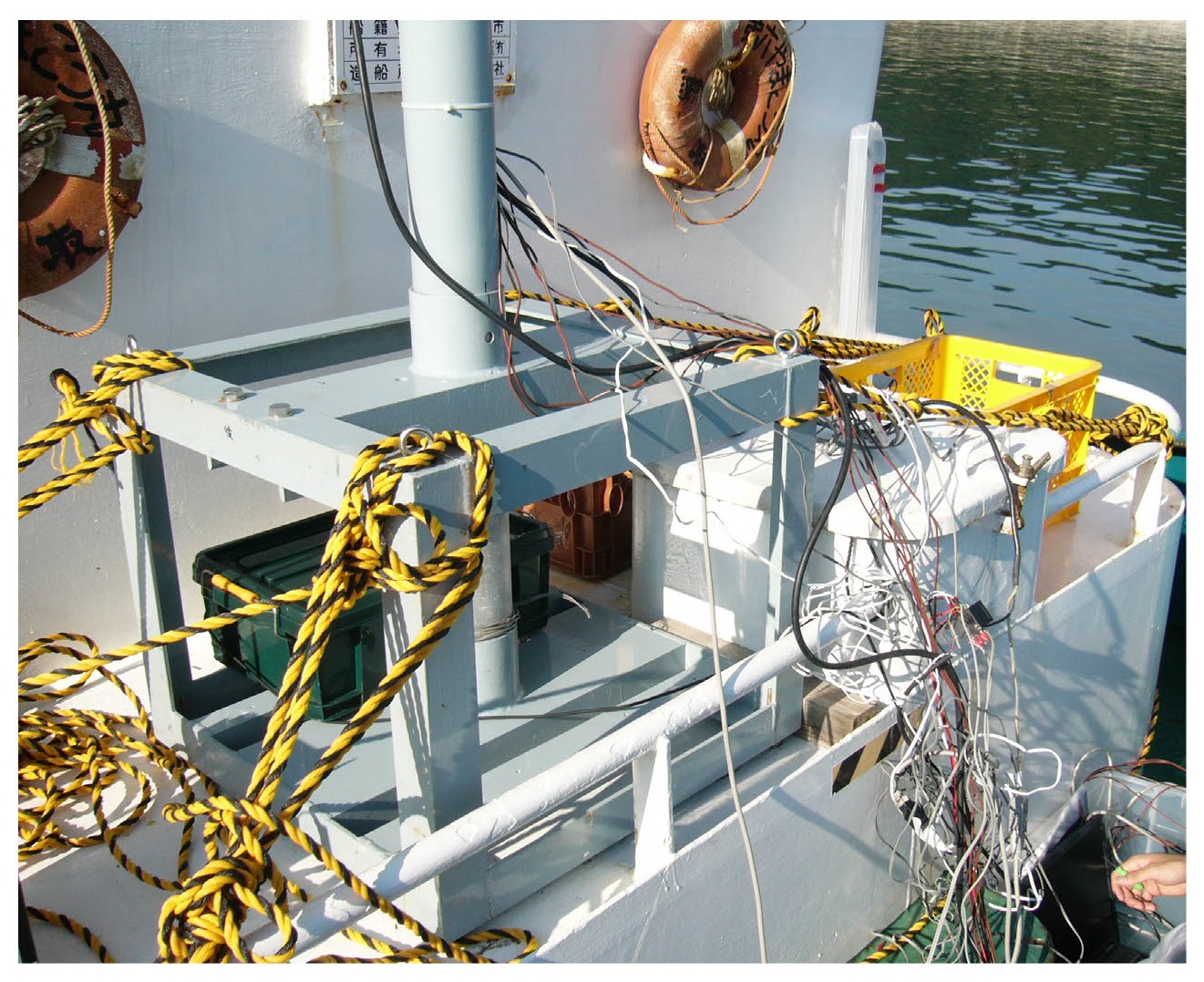
2.1 緒言 風力発電を導入する前には,十分な発電可能量を確保できるかを検証するために,導入予定場所の風況を最低一年間観測する風況精査が必要である.欧州では風速計・風向計を取り付けた高さ100m程のタワーを用いて洋上風力発電のための洋上風況観測が行われている. しかし,欧州と違って海岸べりに複雑な地形の陸地が多い日本では,洋上の風は陸地の影響を受けて風況特性が局地的に異なり,洋上風力発電に適する強風域が偏在していることが予想される.従って,高層タワーによる一地点の風況観測結果からは,偏在する強風域を特定することは困難である. そこで第1章において,船舶およびブイ(浮標)を用いることにより,従来困難であった洋上における広い空間領域の風速・風向の分布を観測し,洋上風力発電に最適な地点を見つけることのできる「洋上風況精査システム」を提案した. 本章では,船舶やブイなど動揺する浮体上での風況観測に必要となる風速・風向の補正方法の基礎研究を行うために,超音波風速計,GPS,慣性運動計測装置による基礎的な洋上風況観測システムを構築し,そのシステムについて詳細に説明すると共に,見かけの風速・風向から真の風速・風向を求める解析方法を説明する. 2.2 浮体上に搭載する基礎的な洋上風況観測システムの構築 本研究では図2-1に示すように,船舶やブイなど動揺する浮体上に搭載して風速・風向を測定するための基礎的な洋上風況観測システムを構築した.本研究では,この洋上風況観測システムを船舶に搭載して基礎研究を行う. このシステムを構成する各センサの仕様を表2-1にまとめる.洋上風況観測システムの主要な部分は,3次元超音波風速計,Differential GPS(差動型全地球測位システム:DGPS),慣性運動計測装置である.これらのデータは,計測時間を完全に一致させるために,同期させてRS232C通信によって1つのPCへ接続している. システムを構成するDGPSは,既に位置が分かっている特定場所でのGPS測位結果から,電離層や大気中の水蒸気によって変化するGPS測位の誤差を求めることで,任意の観測点の位置を補正し,より高精度に位置を求めるGPSである(67).用いた慣性運動計測装置は,3軸のジャイロスコープ,3軸の加速度計および3軸の磁力計を一体化した市販の計測装置であり,傾斜角,角速度,加速度の各3成分を計測している. 本システムは,3次元超音波風速計によって測定される風速の3成分を,DGPSから得られる観測位置と船舶の移動速度,および慣性運動計測装置によって計測される船舶の傾斜角,角速度,加速度を用いて“真の風速”へ変換するシステムである.また本システムでは,三杯型風速計,矢羽型風向計によっても風速・風向を計測すると共に,T型熱電対によって船上の鉛直温度分布も計測している. 洋上風況観測システムを船舶に搭載し,実際に航行させながら風況を観測している写真を図2-2に示す.観測用の小型船舶は,タグボート(18総トン)を用いている.海面上高度約10mにおける風速の3成分を観測するために,船室の前側にマストを設置し,その上端に超音波風速計を取り付けた.マストは外径100mm,内径90mm,長さ8mのアルミ管を使用し,図2-4に示すアルミ製L字アングルを溶接して製作した架台(W=600mm, D=600mm, H=500mm)によって船舶に固定し,マストの上部と中間にワイヤロープを取り付け,四方へ引っ張って固定した.そのため,弾性振動は極めて小さく,比較的弱風中での実験に終始したこともあり,目視ではたわみは全く観測されなかった.従って,本研究ではマスト振動の影響は小さく無視できるものとし,マストは剛体とみなしている. 慣性運動計測装置は,遠心力の影響による計測誤差を抑制するために,船舶の重心に比較的近いマストの下端に設置した.一方,DGPSは電波の受信状態を良くするために船室の上部に設置した.
表2-1 風況観測システムを構成する各センサの仕様の概要
図2-1 構築した洋上風況観測システムの模式図
図2-2 洋上風況観測システムを搭載した小型船舶(タグボート,18総トン)
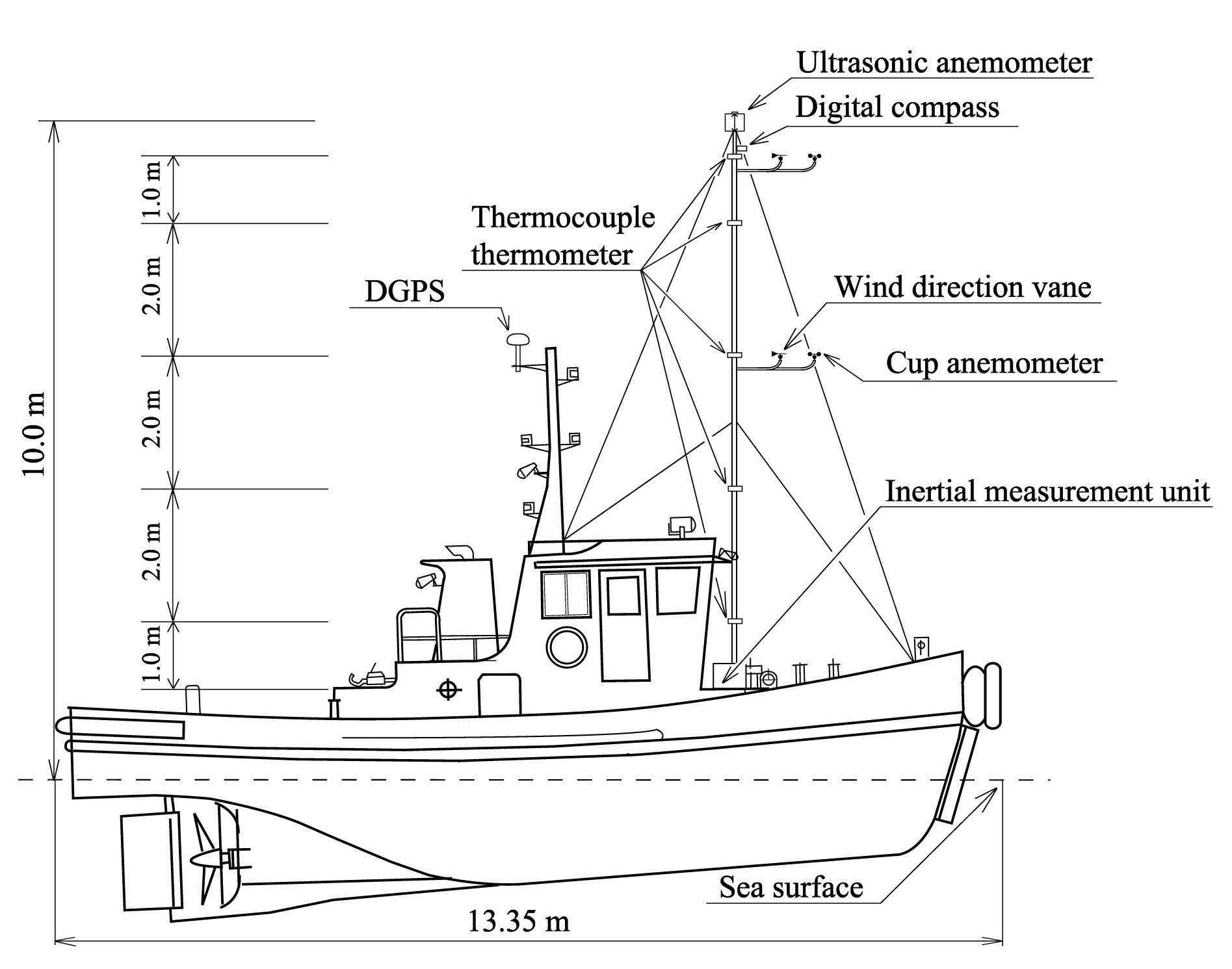
三杯型風速計は海面上6.5m, 9.5mの高さでマストに設置し,矢羽型風向計は海面上6.5mに設置している.またT型熱電対は,海面上2.5m,4.5m,6.5m,8.5m,9.5mの高さでマストに取り付け,船上の鉛直温度分布を計測している(図2-3参照). 船舶の甲板に垂直に取り付けられたマストは,船舶が航行すると図2-2の写真のように船首部分が持ち上がり,後方へ僅かに傾いた状態で移動することになる.しかし,後述する風速の変換理論の方法によってこのようなマストの傾斜についても補正している.
図2-3 洋上風況観測システムを搭載した小型船舶の模式図
図2-4 アルミ管のポールとL字アングルで構築した架台
2.4 浮体上での観測における風速変換法 波に揺れる船舶を用いた風況観測を行う場合,船のマスト上端に取り付けた超音波風速計の測定値には,ピッチング,ローリング,ヨーイングによる揺れの速度が増幅された付加的な風速が加わる.また,船舶が航行すると推進速度と同じ大きさで逆方向の付加的風速が生じる.従って,超音波風速計によって直接計測される“見かけの風速・風向”からこれらの付加的風速を除いて“真の風速・風向”に変換することが必要である.
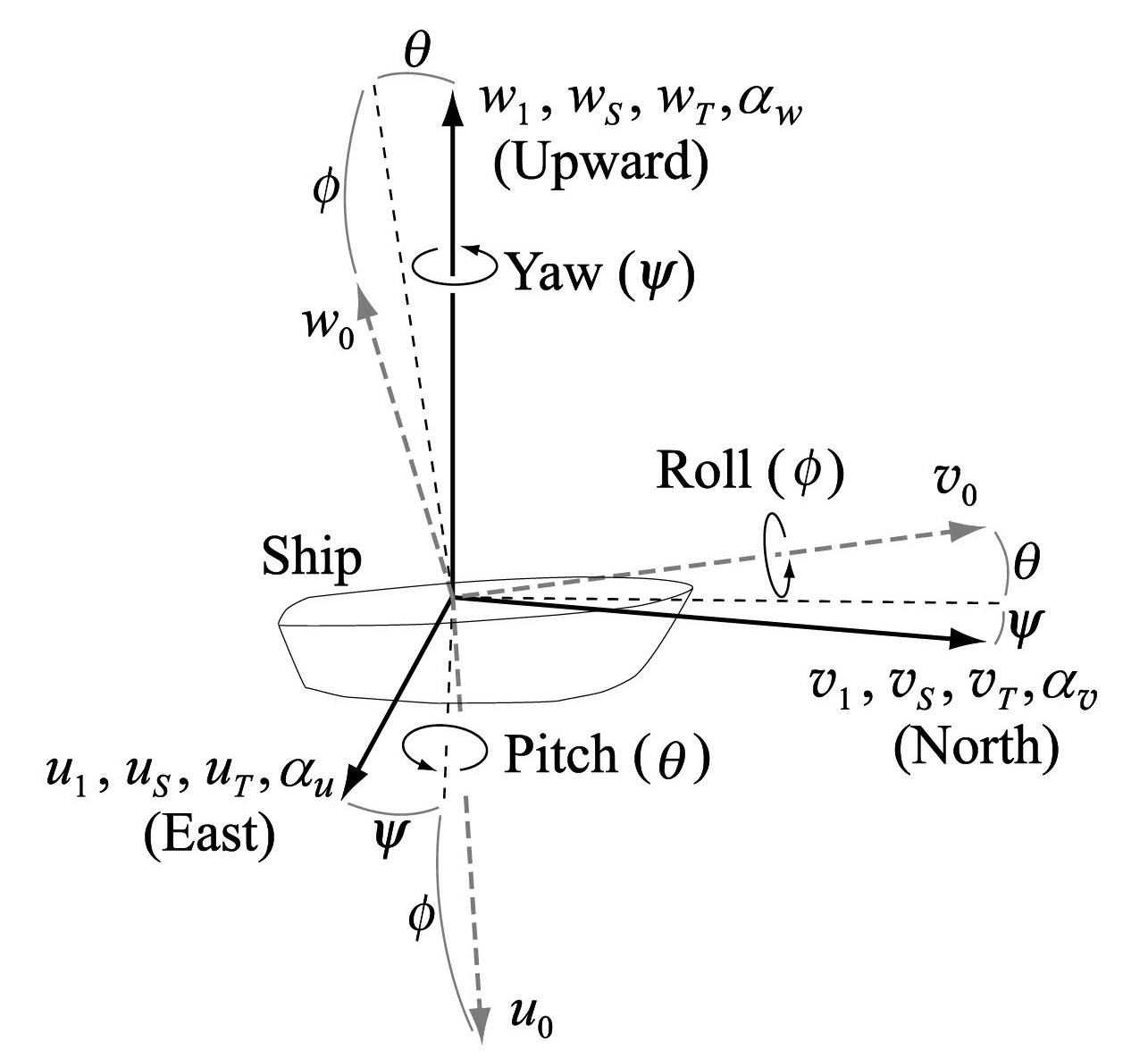
図2-12 地球を基準とする平面直角座標系と船舶を基準とする座標系 風速の変換に際して,船舶あるいは計測システムに固定された速度の座標系と,局所平面直角座標系で表される観測地点における速度の絶対座標系を図2-12のように定義する.船舶あるいは計測システムに固定された速度の座標系を,破線矢印の直交座標(u0,
v0,
w0)によって示し,観測地点における速度の絶対座標系を,東西南北の方角および鉛直方向(East,North,Upward)と対応付け,実線矢印の直交座標によって示している.超音波風速計によって直接計測される見かけの風速は,風速ベクトルU0
(u0, v0,
w0)に対応し,軸の矢印方向へ吹く風を正の値とする.例えば,船舶の左舷方向から右舷方向へ吹く風は風速u0の正の値で示される. 船舶の傾き角は,ピッチ角q ,ロール角f ,ヨー角y で表し,それぞれの角速度( 超音波風速計によって計測される見かけの風速から船舶の傾き角,角速度による揺れの速度および並進速度を取り除く“真の風速”への変換は式(2-1)に基づいて行う.
UT
= TU0 + W
× TR + US
= U1
+ US
(2-1) U1 = TU0
+ W × TR
(2-2) ここで, UT
= (uT, vT,
wT): 真の風速 T
: 座標変換行列 U0
= (u0, v0,
w0): 超音波風速計によって直接計測される見かけの風速 W
: 船舶の動揺の角速度ベクトル R
= (rx , ry , rz):慣性運動計測装置から超音波風速計までの位置ベクトル US
= (uS, vS,
wS): 船舶の並進速度 U1
= (u1, v1,
w1): 船舶の傾き角,角速度のみを変換した風速 式(2-1), (2-2)では,傾斜の補正と移動速度の補正の段階を分けるために,傾斜角および角速度を補正した段階の風速U1を導入している. 超音波風速計を設置したマストは,弾性振動が小さいものとして,剛体とみなしている.式(2-1),
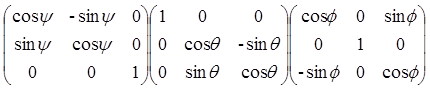
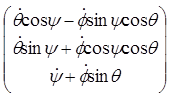
(2-2)で用いた座標変換行列Tと角速度ベクトルW
は,式(2-3),
(2-4) によって表される. T
= W =
船舶の並進速度US = (uS,
vS, wS)
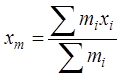
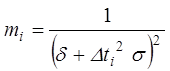
は,DGPSによる位置データから以下に示す方法で求めた.まず,サンプリング周波数5Hzで得られたDGPSによる位置データ(ただし,1Hzの位置データを補間した5Hzデータ)を10Hzデータに線形補間した(つまり,元は1Hzの位置データを10Hzのデータとして補間).この位置データを移動平均した後に,連続する位置データの差分から0.1s毎の移動距離を求め,これを0.1sで除することで,船舶の並進速度USを求めた.この移動平均においては,各位置データに,それぞれのデータが有する誤差を考慮した重み付けを行い連続する加重平均値として求めた.この際,位置データxiの重みをmiとすると,移動平均xmの最良推定値は式(2-5)で与えられる(68).
式(2-5)では,移動平均値xmと位置データxiの時間間隔をDtiとして表している.また,s
は加速度に相当する値であり,ここでは洋上での観測時に得られた加速度の標準偏差から,s = 0.2 m/s2を代表値として用いた.式(2-5)のd は,DGPSの測位誤差であり,ここでは表2-1の仕様に基づく平均二乗誤差RMSEの値からd = 1mとした.以上のようにして式(2-5)から決定される重み関数miを図2-13に示す.重み関数miは,航行している船舶の瞬間瞬間の値を重視するような,正規分布に近い形状となっており,時間が経過すると重みmiが十分に小さくなるため,実際の解析では移動平均値の計算は±10sの範囲で行った. 船舶の並進速度USの解析に用いたDGPSは,慣性運動計測装置からやや離れた船室の上部に設置したため,ピッチング,ローリング,ヨーイングの回転運動によって微小な速度変化が生じる.しかし表2-1に示すように,DGPSの仕様は,サンプリング周波数1Hz(5Hzの場合は,1Hzのデータを線形補間したデータを出力したもの),平均二乗誤差RMSE = 1mであり,DGPSは比較的精度の粗いデータしか得られず,さらに前述の移動平均法により,並進速度の平均値を求めている.従ってDGPS自体の微小な速度変動は捉えられないため,船舶の並進速度USの解析において,DGPSと慣性運動計測装置の設置位置の違いを補正することは行っていない.
図2-13 DGPSのデータを移動平均する際の重み関数
2.5 結言 本章では,船舶やブイなど動揺する浮体上での風況観測に必要となる風速・風向の補正方法の基礎研究を行うために,超音波風速計,GPS,慣性運動計測装置による基礎的な洋上風況観測システムを構築した.また,実海域における海面上高さ10mの風速・風向データを観測する予備的実証試験を行うために,この風況観測システムを小型船舶に設置した. 船舶やブイを用いた風況観測を行う場合,波による揺れや移動による運動速度が加わるため,直接計測される見かけの風速から,ピッチング運動,ローリング運動,ヨーイング運動,および並進運動によって付け加わる風速成分を取り除かなければならない.本章では,このような風速・風向の変換方法の理論と,風況観測システムから得られるデータの解析方法を説明した. なお,本観測システムは,船舶の上下運動や船上近傍の気温も計測している.船舶の運動計測データは,海面波高や海面粗度の解析などへも応用できる可能性を持ち,船上の温度分布のデータからは,船上近傍の大気安定度を求める解析が可能である.
Copyright (c) 2015-2018 Offshore Wind Laboratory LLC. All rights reserved.
|