| 洋上風力研究所 |
0858-35-2283
|
|---|
合同会社 洋上風力研究所
|
「移動船舶によるオフショア風況観測法に関する研究」抜粋
第3章 移動船舶による洋上風況観測実験
3.1 緒言 第2章において,船舶やブイなど動揺する浮体上での風況観測に必要となる風速・風向の補正方法の基礎研究を行うために,超音波風速計,GPS,慣性運動計測装置による基礎的な洋上風況観測システムを構築した. 本章では,構築した洋上風況観測システムを船舶に搭載し,鳥取県沖合において海面上高さ10mの風速・風向データを観測する洋上風況観測の予備的な実証試験を行う.またこの実証試験で得られる,洋上における実際の観測データを解析して,風速変換の効果と本観測システムの有効性を検証する.さらに鳥取県沖合の広域における風速・風向の概況を調査し,洋上においても風速・風向が局所的に異なることを実証する.
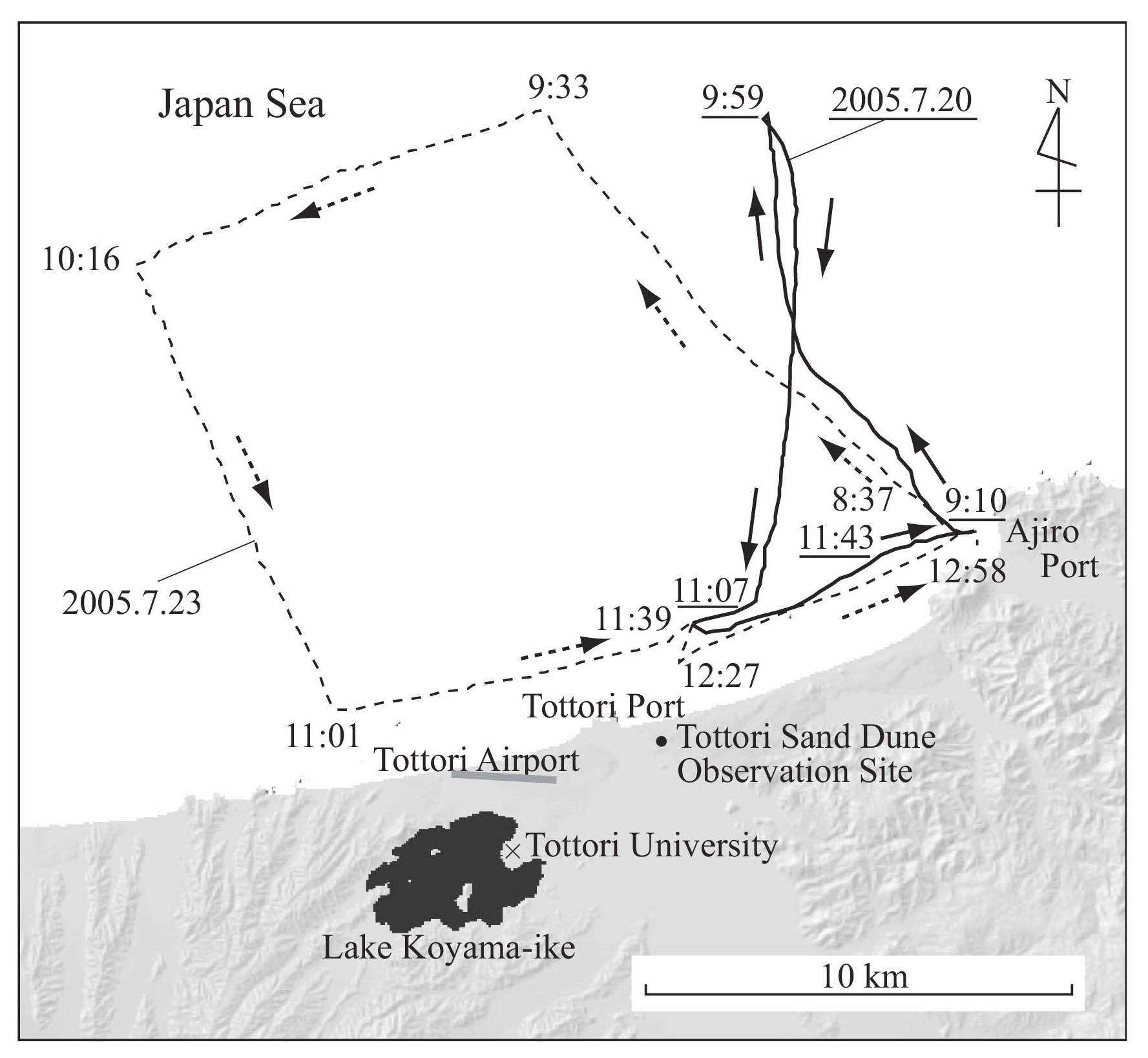
3.2 観測日および観測場所 本研究で行った洋上における風況観測実験は,タグボート(18総トン)に洋上風況観測システムを搭載し,2005年7月20日および7月23日の日中に,図3-1に示すように鳥取砂丘沖合・鳥取港周辺の日本海で行った.7月20日の航路は図3-1において実線で示し,7月23日の航路は破線で示した.航路の近くに併記した矢印によって船舶の移動方向を示し,航路を転進したポイントなどに時間(時:分,JST)を併記している. 7月20日における航路は,鳥取県岩美郡岩美町網代港を出航し,まず沖合へ向かって北上した.午前10時頃に折り返して鳥取砂丘へ向かって南下し,鳥取砂丘付近で約20分間停泊観測した後,網代港へ帰港した. 7月23日は,一度の観測で出来るだけ広い海域を網羅するように,海岸に平行と垂直の航路が形成する矩形の観測航路を採用した.すなわち,網代港を午前8時37分に出発した観測船は,速度約9 knot(約16.7km/h ,約4.6m/s)で北西に約15km沖合まで航行した後,午前9時33分に進路をほぼ西向きに取り約10km直進した後,午前10時16分に進路を南に向け陸にある鳥取空港を目指して直進した.午前11時頃には陸にほぼ平行に東進して,途中鳥取砂丘付近で約50分間停泊して詳しく風速・風向を観測し,その後直進して12時58分に網代港へ帰港した.このような経路を辿りながら,船舶による航行移動観測を行った.
図3-1 鳥取県沖合における船舶の観測実験航路 (2005年7月20日,7月23日,JST)
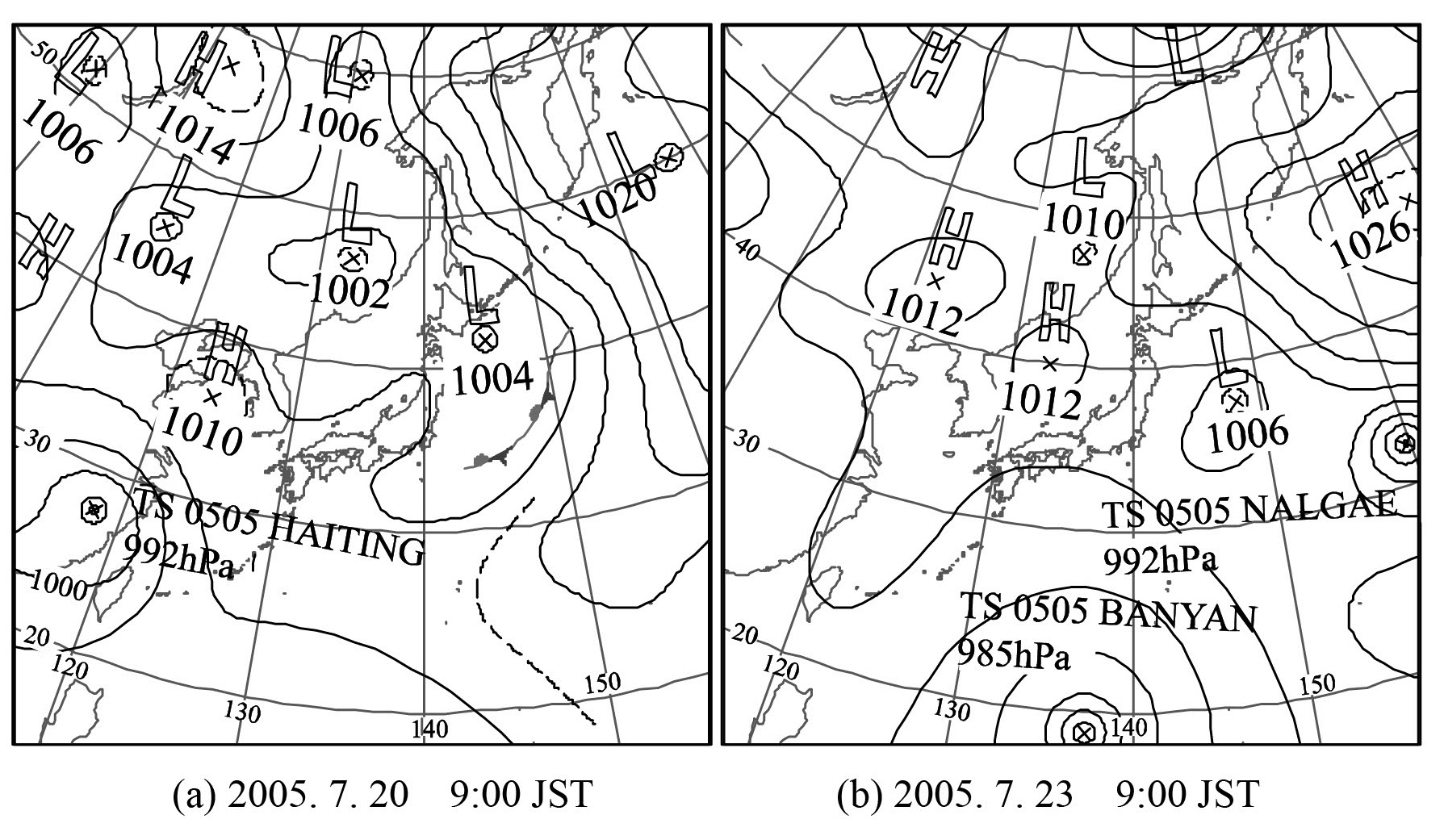
洋上の風況観測日(7月20日,7月23日)における天気図(気象庁発表)(69)を図3-2に示す.実験場所である鳥取市周辺における7月20日の天気は薄曇であったが,最高気温が32.5℃(鳥取地方気象台)となる真夏日であった.海岸線から約350m陸地に入った鳥取砂丘の小高い丘(北緯35度32分,東経134度12分,標高35m)に設置している陸上の気象観測装置(観測高さ:地上高4.5m)のデータによると,海岸線付近では,同日午前8時30分頃(JST)から18時頃まで北〜北北西の海風が継続的に吹いていた.また,7月23日における鳥取市周辺の天気は晴れ,最高気温は30.7℃であった.前述の鳥取砂丘の観測データによれば,観測領域付近の陸上では同日午前8時頃(JST)から19:30頃まで北東の風が継続的に吹いていた.
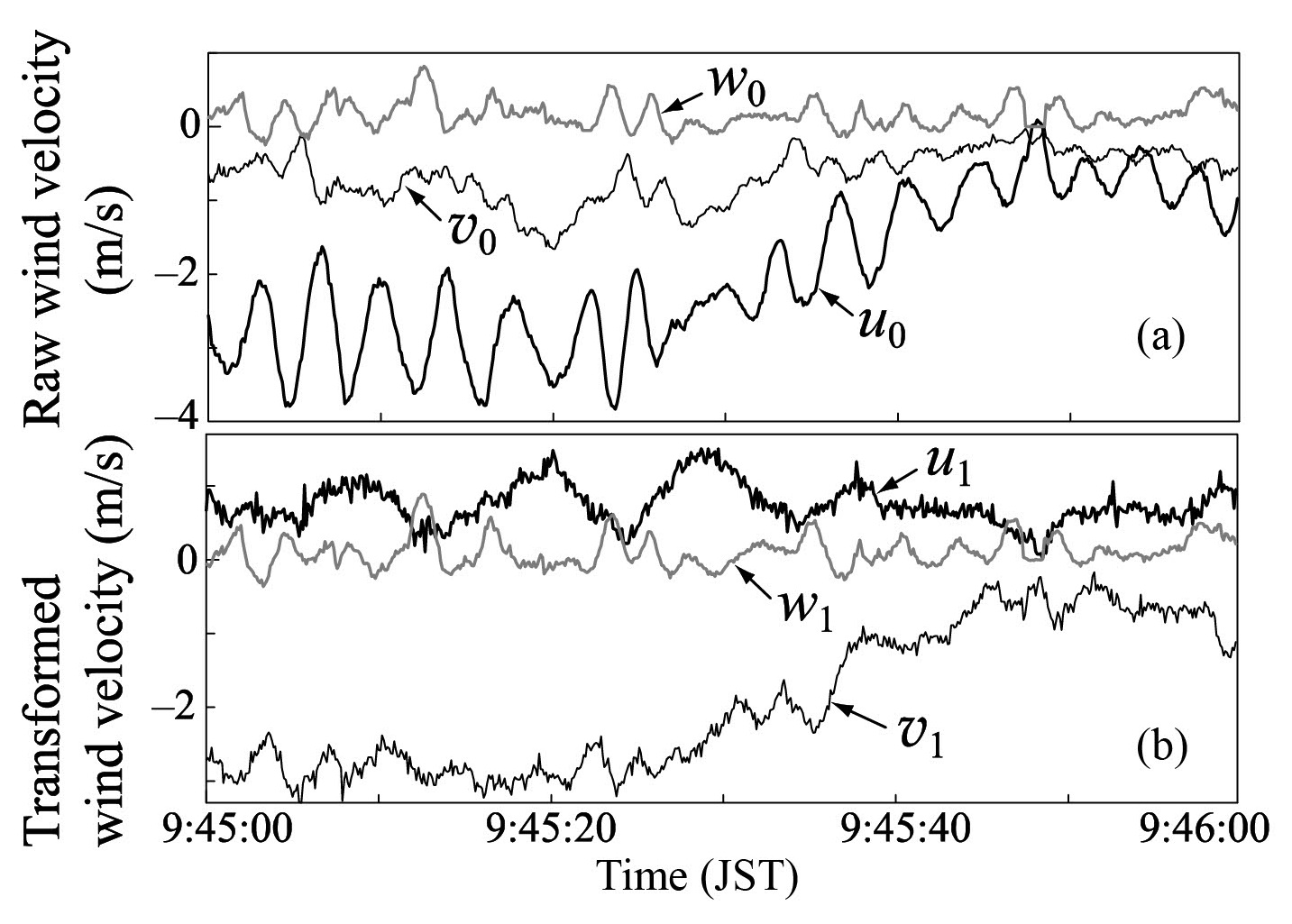
図3-2 各観測日における午前9時の天気図(気象庁発表) 3.3 観測結果および考察 3.3.1 時系列データ解析 7月23日に行った洋上風況観測実験において,鳥取県の沖合い約15km(図3-1)を,西向きに航行した午前9時33分から10時16分のデータから無作為に選んだ1分間(9:45:00〜9:46:00,JST)の時系列波形を観測例として図3-3〜3-5に示す.超音波風速計で直接計測された見かけの風速U0
(u0, v0,
w0)を図3-3 (a) に示し,式(2-2)によってピッチング運動,ローリング運動,ヨーイング運動のみの風速成分を除去した風速U1
(u1, v1,
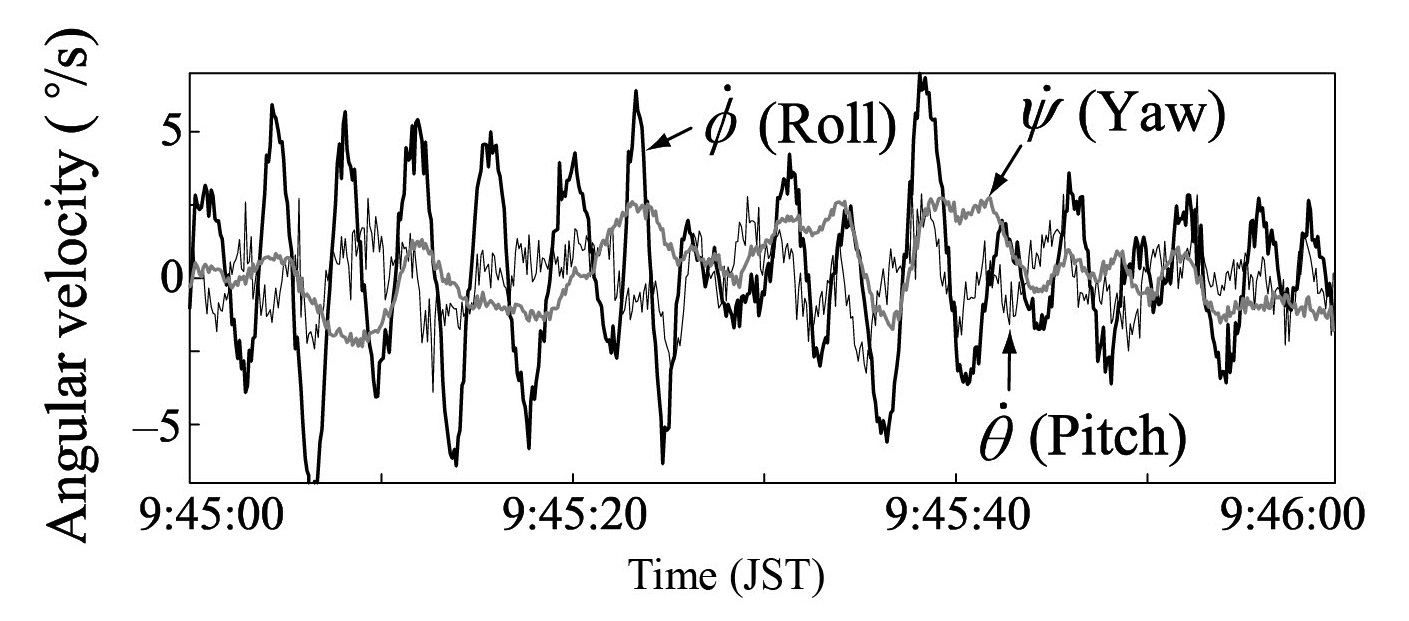
w1)を図3-3 (b)に示す.風速U1は,船舶の並進速度USを取り除く前の風速に相当する. この同時刻に慣性運動計測装置から得られた船舶の時々刻々変化する角速度の3成分( 図3-3(a)
において,風速u0には,2〜3秒周期の大きな変動が認められる.この変動は,図3-4における船舶のローリング角速度
図3-3 (a) 見かけの風速ベクトルU0 (u0,
v0, w0);(b) 船舶の傾斜角・角速度に 基づいて補正した風速ベクトル U1 = (u1, v1, w1)
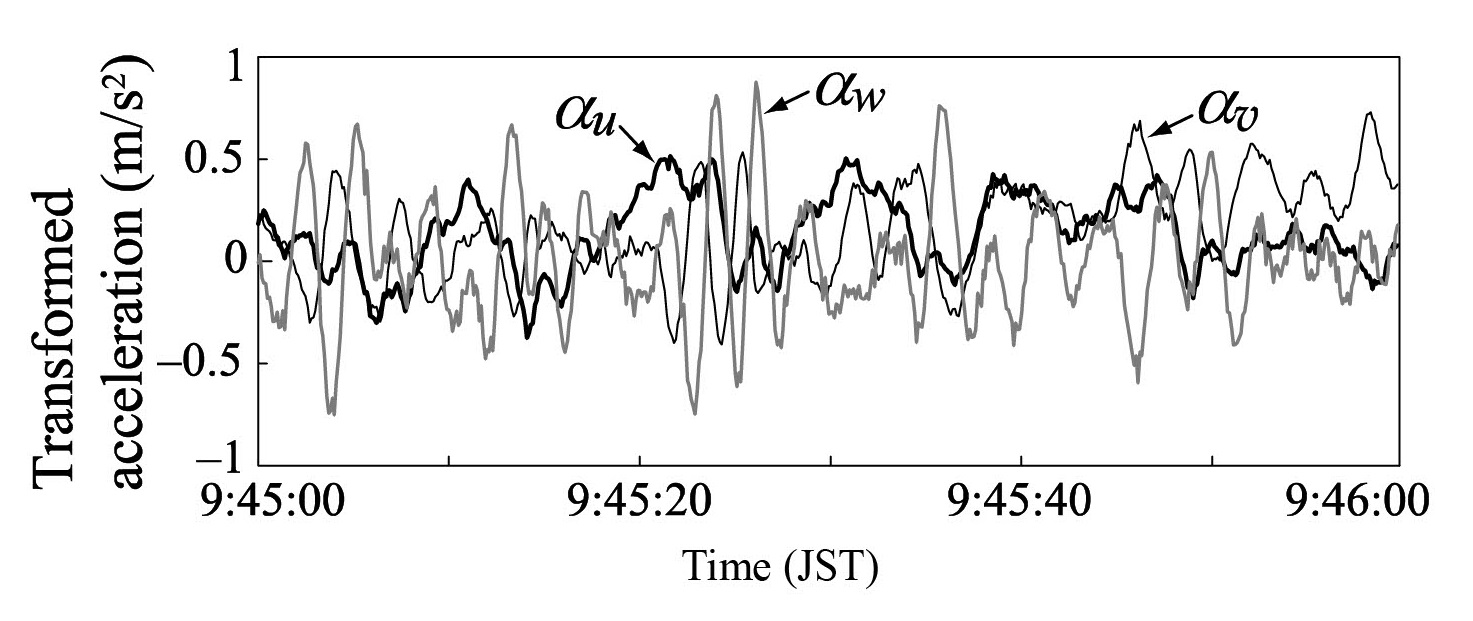
図3-5 傾斜角に基づいて変換した船舶の加速度 (au
, av
, aw) 図3-3 (b)に示した風速U1 (u1, v1, w1)は,船舶のピッチング,ローリング,ヨーイング運動によって超音波風風速計に付加される速度成分を除去した風速である.このデータの取得時は,船舶はほぼ真西に向かって航行しているため,図3-3(a)におけるu0の成分は,約90°変換されて,図3-3(b)におけるv1の成分とほぼ対応する.この2つの波形を比べると,u0に表れていた大きな変動が,v1では取り除かれており,ローリング運動によって付加された速度成分を除去する,いわゆるローリング補正が有効に働いたことが分かる.しかしながら,補正した風速の波形U1
(u1, v1,
w1)(図3-3 (b))には,元の風速波形U0
(u0, v0,
w0)(図3-3 (a))においては見られないような高周波の変動が表れている.この高周波変動は,角速度の波形( また,図3-3
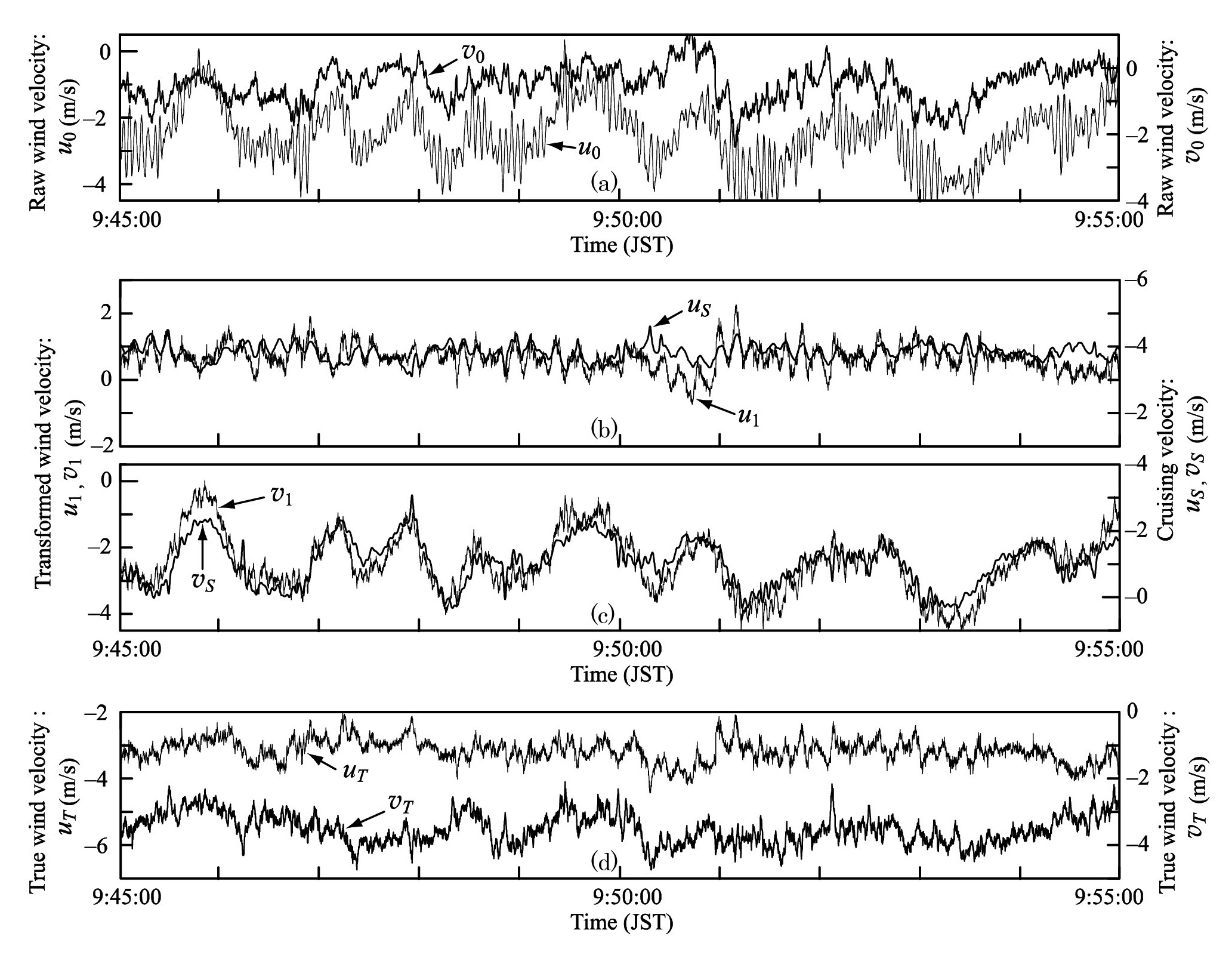
(b)の風速u1(絶対座標:東西方向)においては,周期10秒程度の風速変動が見られる.一方,図3-5における船舶の並進加速度au(絶対座標:東西方向)にも,周期10秒程度の変動が見られる.風速u1は,真の風速に船舶の並進速度が付加された相対的な風速であるため,風速u1に表れている周期10秒程度の風速変動は,船舶の並進運動の影響によるものと考えられる. さらに,変換前,変換後の風速および船舶の移動速度のu , v成分について10分間(9:45:00〜9:55:00, JST)の時系列波形を図3-6に示し,それらの各時系列データを高速フーリエ変換して得られたパワースペクトルを図3-7に示す.図3-6における二つの時系列波形は縦軸を左右別々の軸に示し,二つの速度成分の比較が行い易いように原点をずらしている.図3-6 (b),(c)においては船舶の並進速度(uS , vS)の軸は正負を反転させて,風速(u1 , v1)との比較を容易にしている.また,図3-6 (a)は,超音波風速計によって直接得られた見かけの風速(u0
, v0)である.図3-6
(a)では,特にu0の波形が船舶のローリング運動によって2〜3秒周期で激しく変動している. 図3-6 (b),(c)は,ピッチング運動,ローリング運動,ヨーイング運動による風速成分を除去した風速(u1 , v1)と式(2-5)で示した前述の移動平均法を用いてDGPSのデータから解析した船舶の並進速度(uS , vS)を併記している.風速(u1 , v1)では,図3-6
(a)のu0に表れていた2〜3秒周期の激しい変動がほとんどみられなくなっている.また,風速(u1 , v1)と船舶の並進速度(uS , vS)の波形は,周期的な変動波形がよく類似しており,補正前の風速変動(u1
, v1)は,船舶の航行速度の変動成分が付加されたものであることが示されている. 図3-6 (d)では,風速(u1
, v1)と船舶の並進速度(uS
, vS)の和(式(2-1))によって最終的に得られる真の風速(uT
, vT)を示している.真の風速(uT
, vT)では,超音波風速計で直接計測された見かけの風速(u0
, v0)や風速(u1
, v1)に表れていた周期的な激しい変動が取り除かれている.
図3-6 10分間の時系列波形の比較: (a)
見かけの風速(u0 , v0); (b)-(c)
傾斜角を補正した風速(u1 , v1)と船舶の移動速度(uS , vS); (d) 真の風速(uT , vT). 船舶の移動速度(uS , vS)の軸は反転させて表示している.
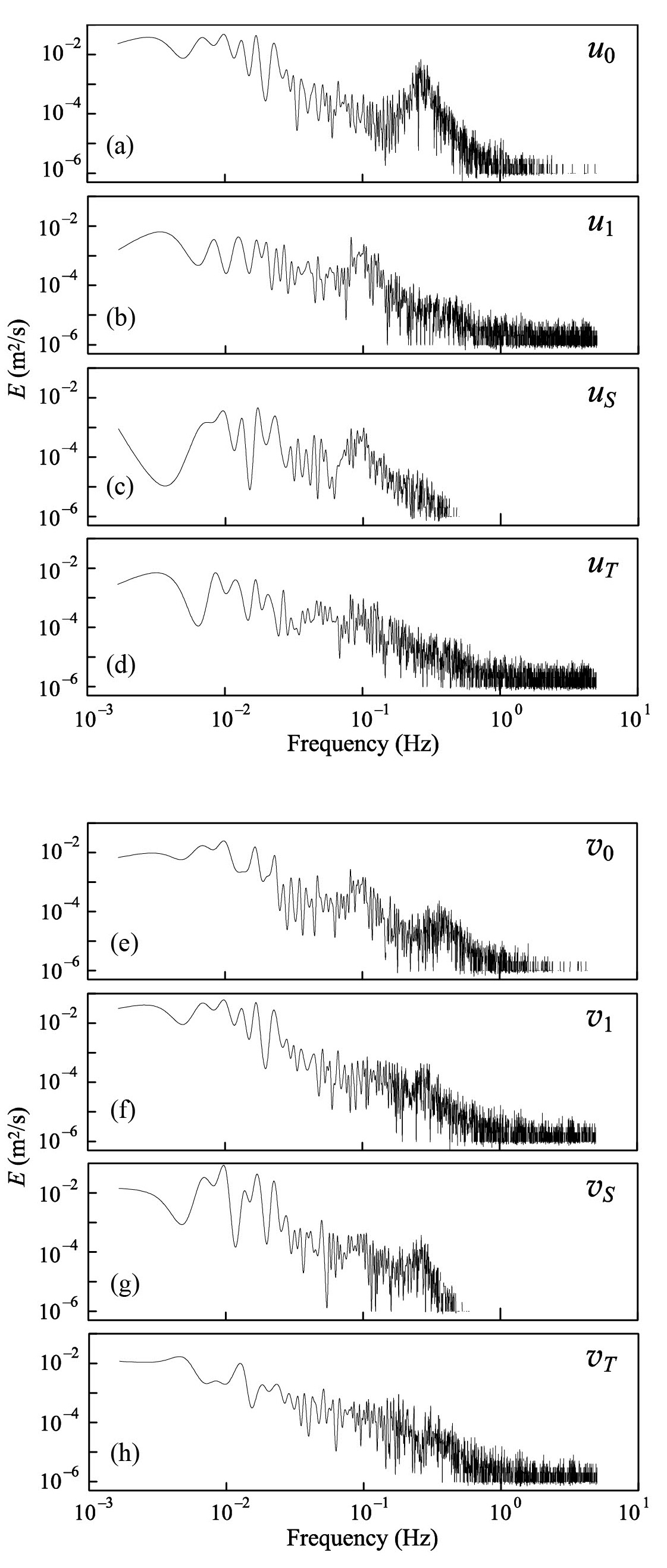
図3-7 風速と船舶速度の時系列波形(図3-6)のパワースペクトル 一方,図3-7(a)に示すように,超音波風速計で得られた見かけの風速u0のパワースペクトルにおいて,0.26Hz付近に大きなピークが表れている.これは,図3-6(a)の時系列波形に表れていたローリング運動による激しい変動によるものである.また,図3-7 (b)と図3-7 (c)に示した風速u1と船舶の並進速度uS のパワースペクトルにおいて,
0.1Hz付近に比較的大きなピークが見られる. 図3-7 (b), (f)に示した風速(u1
, v1)のパワースペクトルにおいては,見かけの風速(u0
, v0)よりも高周波部分のエネルギーレベルが上昇している.これは前述したように,慣性運動計測装置に固有のノイズが変換後の風速(u1
, v1)へ反映されたためと考えられる. 最終的に得られた真の風速uT
のパワースペクトル(図3-7
(d))では,前述したような特定周波数のピークがほとんど現れていない.この傾向は図3-7
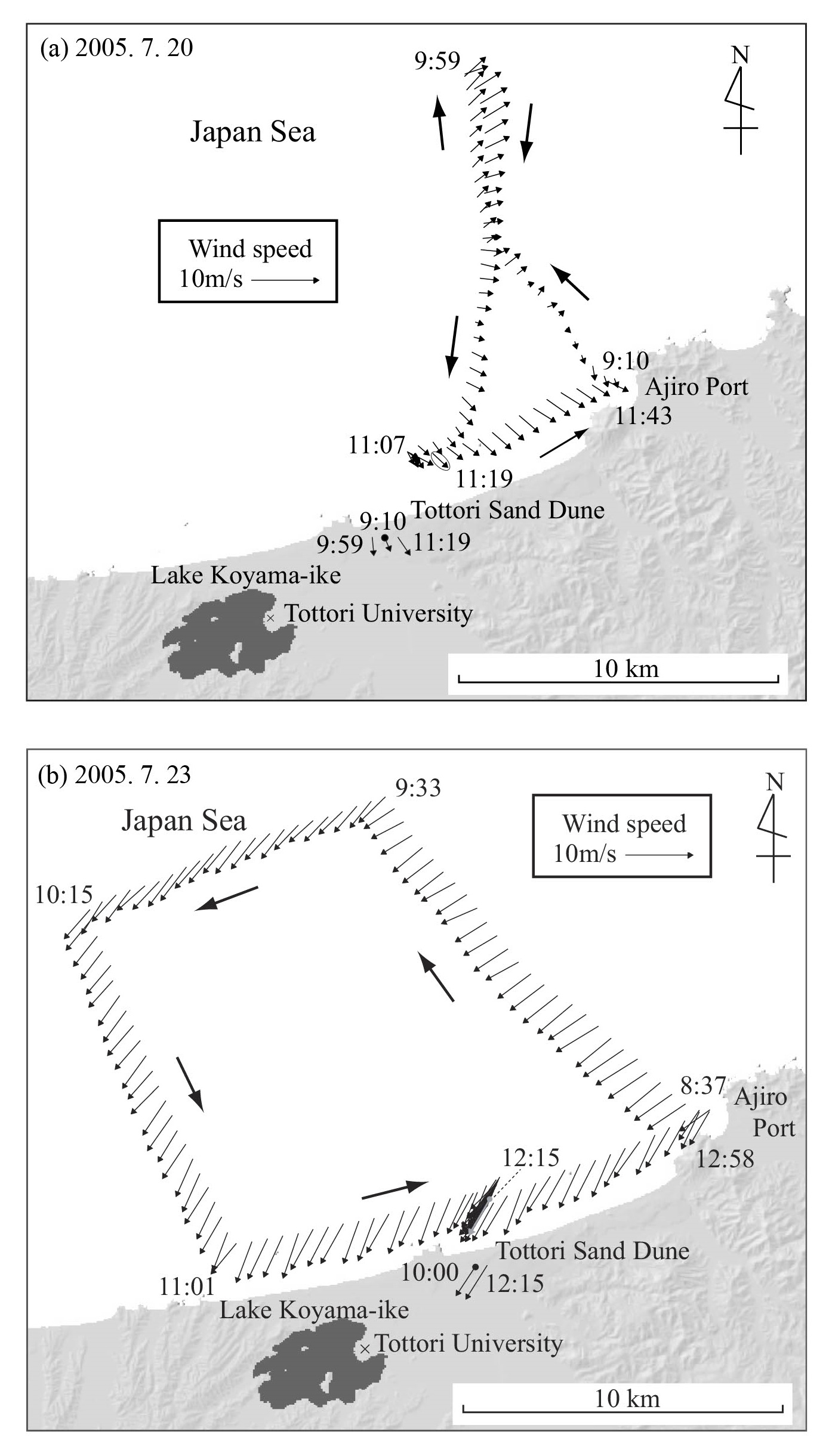
(h)に示した真の風速vTのパワースペクトルにおいても同様であり,自然風のスペクトル分布が再現されたものと考えられる.従って,最終的に得られた真の風速では船舶の運動による周期的な変動が取り除かれており,式(2-1)による風速の変換が有効に働いたことが確認された. 3.3.2 風速・風向のベクトルマップ 前述の式(2-1)に基づく変換方法によって得られた真の風速成分を,1分毎に平均して矢印によって地図上に表したベクトルマップを図3-8に示す.図3-8のベクトルマップでは,風速を矢印の長さで示し,風向を矢印の向きで示している.また図中には,前述した鳥取砂丘における観測データの一部についても比較のためにベクトルで示した.洋上において,ベクトルマップの横に併記した矢印は船の進行方向を表し,航路の代表的なポイントには時刻(JST)を併記している. 7月20日における風速・風向のベクトルマップ(図3-8
(a))によると,網代港を出港した直後の時刻(9:10,
JST)では無風に近い状態であったが,岸から離れるにつれて徐々に風が強くなっている.洋上の風向と海岸線に近い鳥取砂丘の風向を比較すると,沖合で進路を折り返した午前9時59分頃では洋上の風向が南西であるのに対して,鳥取砂丘の丘の上では,観測時間を通して北〜北北西の風向を保っていた.また沖合から南下して鳥取砂丘へ近付くにつれて風向は徐々に北寄りの風向に変化している.鳥取砂丘における風速・風向が観測時間を通じてほぼ安定していたことも考慮すれば,陸上への日射によって発達した海風や陸上地形などの影響によって,風速・風向が局地的に異なったものと考えられる.このことから,洋上においても風速・風向は一様ではなく,距離が数km〜10km程度離れると,風速・風向が大きく異なることが示唆された.このような現象は,洋上風力発電の導入において,強風地点を探査して最適地点を選び出すことが重要な課題となることを意味する.
図3-8 船舶の移動観測によって得られた鳥取県沖合の風速ベクトルマップ ((a) 2005年7月20日,(b) 7月23日,JST)
7月23日における風速・風向のベクトルマップ(図3-8
(b))によると,鳥取砂丘も含めた観測領域全体において,観測時間を通して風速6m/s程度の北東風が支配的であり,風速・風向ともに時間と場所による違いは大きく表れなかった.ほぼ矩形の航路を辿って観測した図3-8
(b)のベクトルマップでは,船舶が進行方向を変えたポイントを境に,ベクトルの向きが僅かに変化している.図3-8
(b)におけるベクトルの変化と船舶の進路から推測すると,船舶の前方あるいは後方から風を受ける場合は,船舶の横から風を受ける場合よりも,風速がやや弱く計測されたものと考えられる.このことは,観測船の形状が回転対称体でないことや第4章で述べる甲板のヒートアイランド効果(58), (66),超音波風速計の形状などが原因として考えられる.観測船自体の影響を小さくするためには,マストをより高くし,船室と風速計の距離を離すことなども必要と考えられる. しかしながら図3-8(a)(b)では,船舶が鳥取砂丘の気象観測装置に近付いた7月20日の11時19分および7月23日の12時15分において,船舶と鳥取砂丘の観測データが,ほぼ同じ風速・風向を示している. 以上のことから,装置のノイズや船舶そのものの影響はあるものの,本観測法によって,洋上風力発電の適地選定に用いることの出来る妥当な風況データが得られることが確認された. 3.4 結言 本章では,第2章で構築した基礎的な洋上風況観測システムを船舶に搭載し,鳥取県沖の日本海で洋上風況観測の予備的な実証試験を行った. 実証試験によって得られたデータは,第2章で述べた風速の変換理論によって真の風速・風向を求めるための解析を行った.この結果,船舶の運動によって生じた見かけの風速変動が取り除かれ,真の風速・風向として妥当性のあるデータが得られることを確認した. また,本研究で構築した洋上風況観測システムを船舶に搭載して行う移動観測によって洋上の広い海域における海面に平行な面内での風速・風向の分布が得られることを確認した. なお,この風速・風向の分布によれば,洋上においても風速・風向が一様ではなく,距離が数km〜10km程度離れると,陸風や海風などの影響によって,風速・風向が局地的に異なることが確認された.このことから風力エネルギーの強度分布が偏在していることが分かり,洋上風力発電設備の建設前に,強風地点を探査することの重要性が明白になった.
Copyright (c) 2015-2018 Offshore Wind Laboratory LLC. All rights reserved.
|