| 洋上風力研究所 |
0858-35-2283
|
|---|
合同会社 洋上風力研究所
|
「移動船舶によるオフショア風況観測法に関する研究」抜粋
付録 船舶を使用した風況観測手法の
A.1 緒言 日本における風力発電の導入を統括しているNEDO技術開発機構は,風力発電導入の基準と位置付けられる「風力発電導入ガイドブック」を発行しており,その中で,陸上における風力発電のための風況精査は,3杯型風速計,矢羽型風向計を取り付けた30〜50mの高さのタワーによる観測が推奨されている.その3杯型風速計の精度は,±5%以内(27)とされている.すなわち,風速10m/sであれば,平均二乗誤差RMSE=0.5m/s以下の精度が求められている. 本研究によって構築した風況精査システムを構成する各センサのサンプリング周波数と精度を表A-1にまとめる.これによると,超音波風速計の精度は,例えば風速10m/sのとき,平均二乗誤差RMSE=0.15m/sであり,「風力発電導入ガイドブック」における精度の目安を十分に満たしている. しかし,本論文中で説明したような船舶を用いた風況観測においては,超音波風速計によって計測された風速を,GPSのデータから求める移動速度や慣性運動計測装置の傾斜角・角速度データに基づいて補正しなければならないため,最終的に得られる計測誤差は,これら計測装置の誤差が伝播したものになる. 本付録では,以上のような誤差の伝播について考察し,鳥取沖で行った洋上観測実験における実測のデータも参照しつつ,補正して得られる風速の精度について検討した. 表A-1 各センサのサンプリング周波数と精度
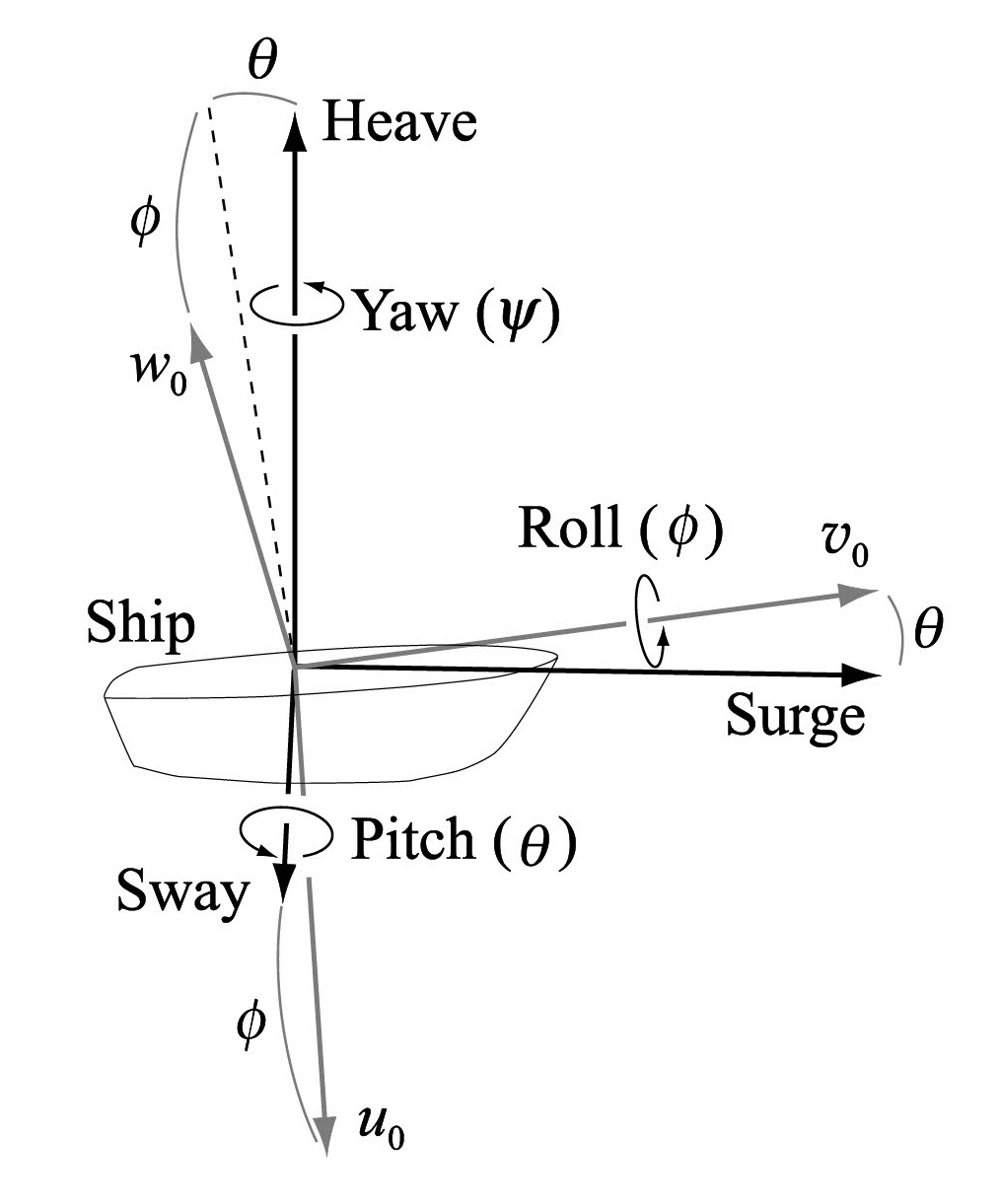
A.2 参照する洋上観測データの概要 風速補正によって伝播する誤差を解析するに当たっては,鳥取沖合で行った洋上観測の予備的実証試験(第3章を参照)のデータを参照して解析する. 2005年7月23日に行った鳥取県沖での洋上観測実験について,波浪による船舶の動揺が比較的激しかった沖合での観測データを抽出し,傾斜角,角速度,加速度の平均値と標準偏差を表A-2にまとめる.表A-2の各値と対応する船舶の座標系を図A-1に示す.表A-2に示した各平均値の中では,ピッチ角 q
の平均値が2.5°と比較的大きい.これは船舶が航行するときに船首がやや上向いていることを反映した結果である. 表A-2 傾斜角・角速度・加速度の平均値と標準偏差 (観測時間:10:20:00 - 10:30:00 JST)
図A-1 船舶の座標系(表A-2と対応)
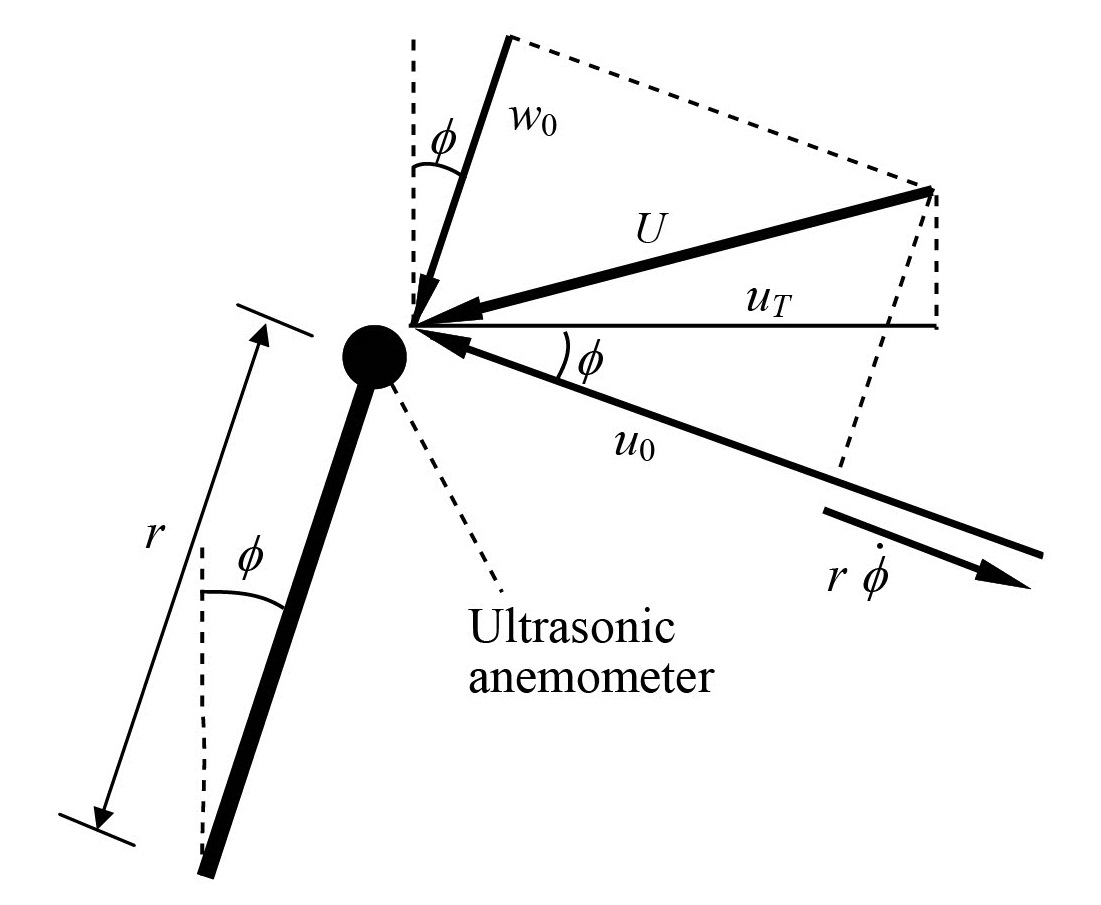
A.3 傾斜補正に起因する風速誤差の検討 本研究では,超音波風速計の傾斜角と角速度を補正することによって生じる風速の誤差について,傾斜運動を2次元に単純化して検討する.図A-2のように,超音波風速計が,傾斜角 f
, 角速度 uT
= u0 cosf
+ w0 sinf − r ここで,r
は,回転運動の中心から超音波風速計までの距離を表している. 式(A-1)に誤差の一般式(73)を適用すると,風速の補正によって伝播される風速uTの誤差 duTは,式
(A-2) によって表される.
図A-2 船舶が傾斜状態にあるときの風速の観測
ここで,du0,
dw0,
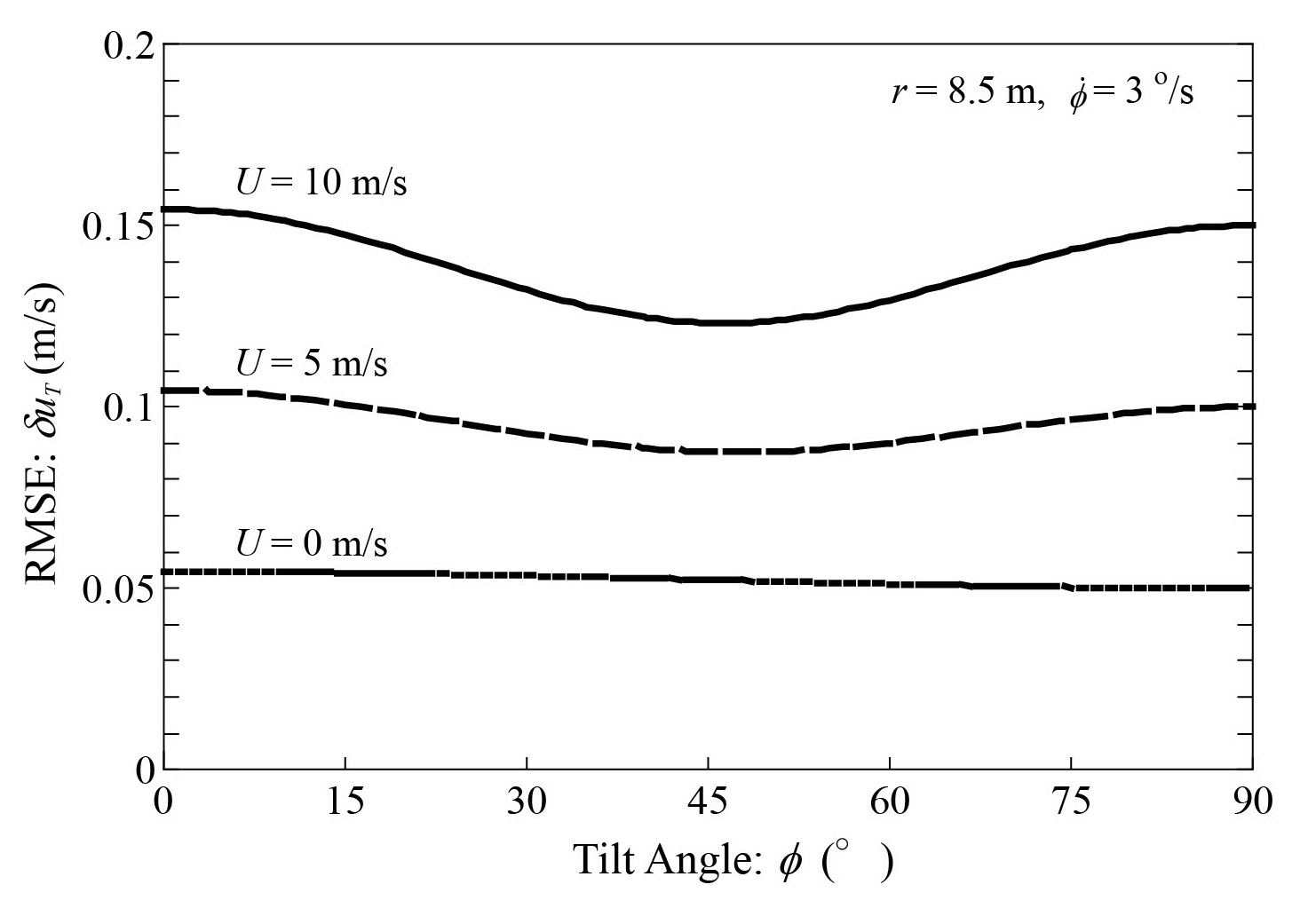
df, 表A-1に示した仕様によれば,超音波風速計の誤差(RMSE)は,例えば風速5
m/sにおいて0.1
m/s(2%)である.図A-3に示されるように,傾斜することによって生じる超音波風速計の誤差は,風速5
m/sにおいて0.1
m/s(2%)程度であり,元々有する誤差とほぼ変わらない程度である.また,誤差は風速が高くなると増加するが,風速10
m/sにおいても0.15
m/s(1.5%)程度に収まっている.
図A-3 船舶の傾斜補正に基づく風速の誤差
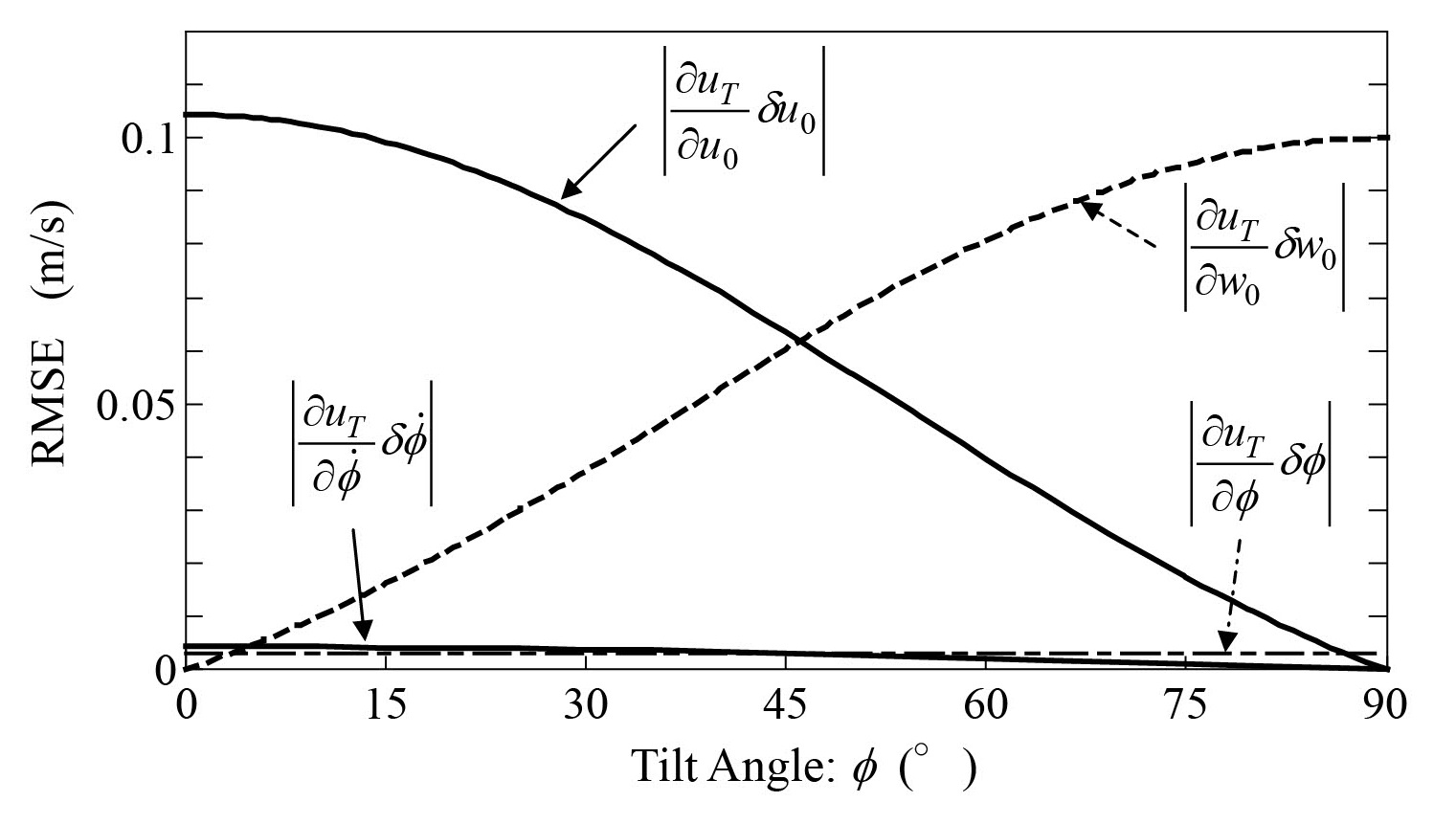
図A-4 傾斜補正に及ぼす各計測値の誤差の比較
また,各計測値の誤差du0, dw0, df, 以上の解析の結果,傾斜角と角速度に基づいて風速を補正しても,求める風速の誤差は元の超音波風速計の誤差とはほとんど変わらず,傾斜補正を行っても,求められる風速に大きな誤差は生じないものと推定される. A.4 移動速度補正に起因する風速誤差の検討 船舶を使用した風況観測においては,移動速度に基づいて風速を補正しなければならない.そこで,本研究ではDGPS
(Differential GPS) の位置情報を利用して移動速度の誤差を検討する. 本研究では,第2章の式(2-5)による移動平均法を用いて,DGPSの測位誤差を減少させている.始めに,その移動平均法を用いた場合の測位誤差を解析する. 船舶の移動は等速運動ではなく,移動速度は波によって常に変動している.その移動速度の変化の程度は,実際に洋上実験で得られた加速度のデータを用いることができる.ここでは,このような移動速度の変動も考慮に入れた誤差の程度を見積もるために,移動速度の変化を代表する値として,表A-2に示したSurge加速度の標準偏差を参照し, s =0.2 m/s2を代表値として用いる.このとき,移動平均法によって求められる位置の誤差s movは式(A-3)によって与えられる.
このようにして,移動平均法によって求められる位置x1とx2の誤差は,移動平均法を用いない場合よりも小さくなる.そこで,ここでは位置の誤差(RMSE)の上限値として,移動平均法を用いない場合を考えて,表A-1に示されるDGPSの仕様から,位置x1,
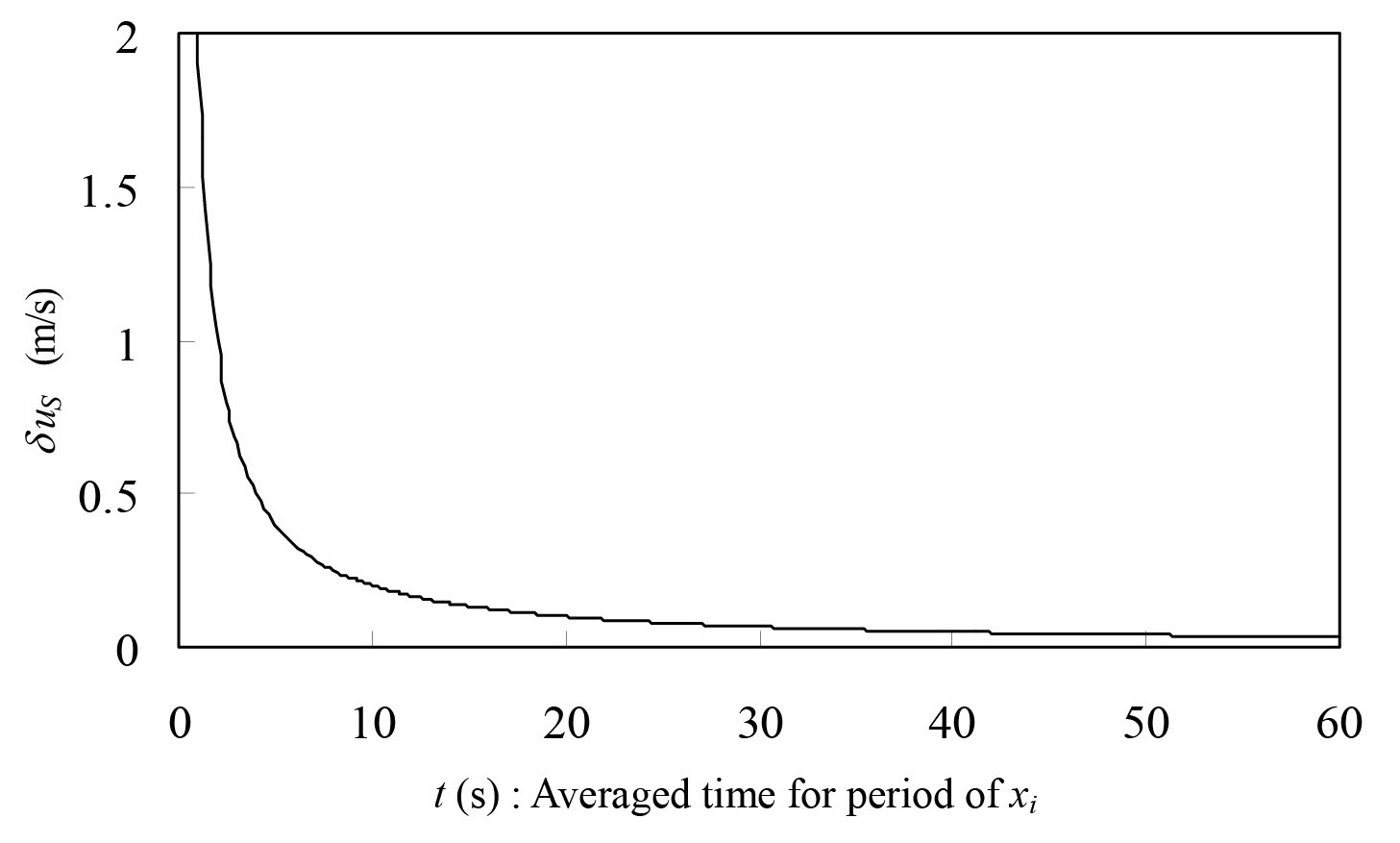
x2の誤差 d x1, d x2の値をRMSE = 1 m とする. 第2章で述べたように,船舶の移動速度は,船舶の位置の差分を時間で除することによって求めている.このとき,位置データx1,x2が計測される間の時間,すなわち移動速度の平均化時間をt ,その誤差をd t とした場合,移動速度uSに対する誤差d uSは,相対誤差として式(A-4)のように求められる.
ここで,時間の誤差d t は,DGPSの仕様には明示されていないが,本論文で解析しているような1分平均値を求める場合には,t = 60 s であるため,式(A-4)の時間tの相対誤差は,極めて小さくなる.そこで,時間tの相対誤差を無視できるものと考え,式(A-4)を式(A-5)に置き換える.
表A-1に示されるDGPSの測位誤差を参照し, d x1, d x2をRMSE = 1 m として,式(A-5)によって移動速度の誤差d uS を計算すると,この値は時間間隔tに
図A-5 移動速度の誤差d uSと時間間隔tの関係
図A-5では,移動速度の誤差が,時間間隔tに大きく依存して変化しており,例えば,時間間隔が短い瞬間的な移動速度を求めようとする場合には誤差が大きくなる.しかし,例えば移動速度の1分平均値を求める場合のように,時間間隔を十分に長くとれば,誤差は十分に小さくなる.
A.5 結言 本研究では,船舶によって風況観測を行うことによって生じる移動速度や傾斜角・角速度をDGPSや慣性運動計測装置のデータによって補正しているため,この補正によって伝播される誤差を解析して検討した. この解析の結果,本観測システムを用いた傾斜補正を行って求める風速の誤差は,元の超音波風速計の誤差と大差なく,傾斜補正を行っても,求められる風速に大きな誤差は生じないことが分かった. また船舶の移動速度の補正について調べるために,DGPSのデータから求められる移動速度の誤差について検討した.移動速度は位置データの差分を各位置の時間間隔で除することによって求めているため,移動速度の誤差は,この時間間隔に大きく依存して変化する.時間間隔が短い瞬間的な移動速度を求めようとする場合には誤差が大きくなるが,移動速度の1分平均値を求める場合のように,時間間隔を十分に長くとれば,求める移動速度の誤差は十分に小さくなることが分かった.
Copyright (c) 2015-2018 Offshore Wind Laboratory LLC. All rights reserved.
|